Tým AmBot v roce 2013
V roce 2013 jsme se soustředili výhradně na Robotický den 2013 v Praze a pro tuto soutěž jsme připravili celkem 4 roboty, každý v jiné kategorii. Štěstí nám přálo, takže jsme s robotem AmCar získali první místo v kategorii RoboCarts, s robotem AmBear druhé místo v kategorii Bear Rescue (Advanced) a s robotem AmStore druhé místo v kategorii Ketchup House. Robot AmLine se v kategorii Line Follower umístil na 11. místě (z více než 30 soutěžících).
AmCar
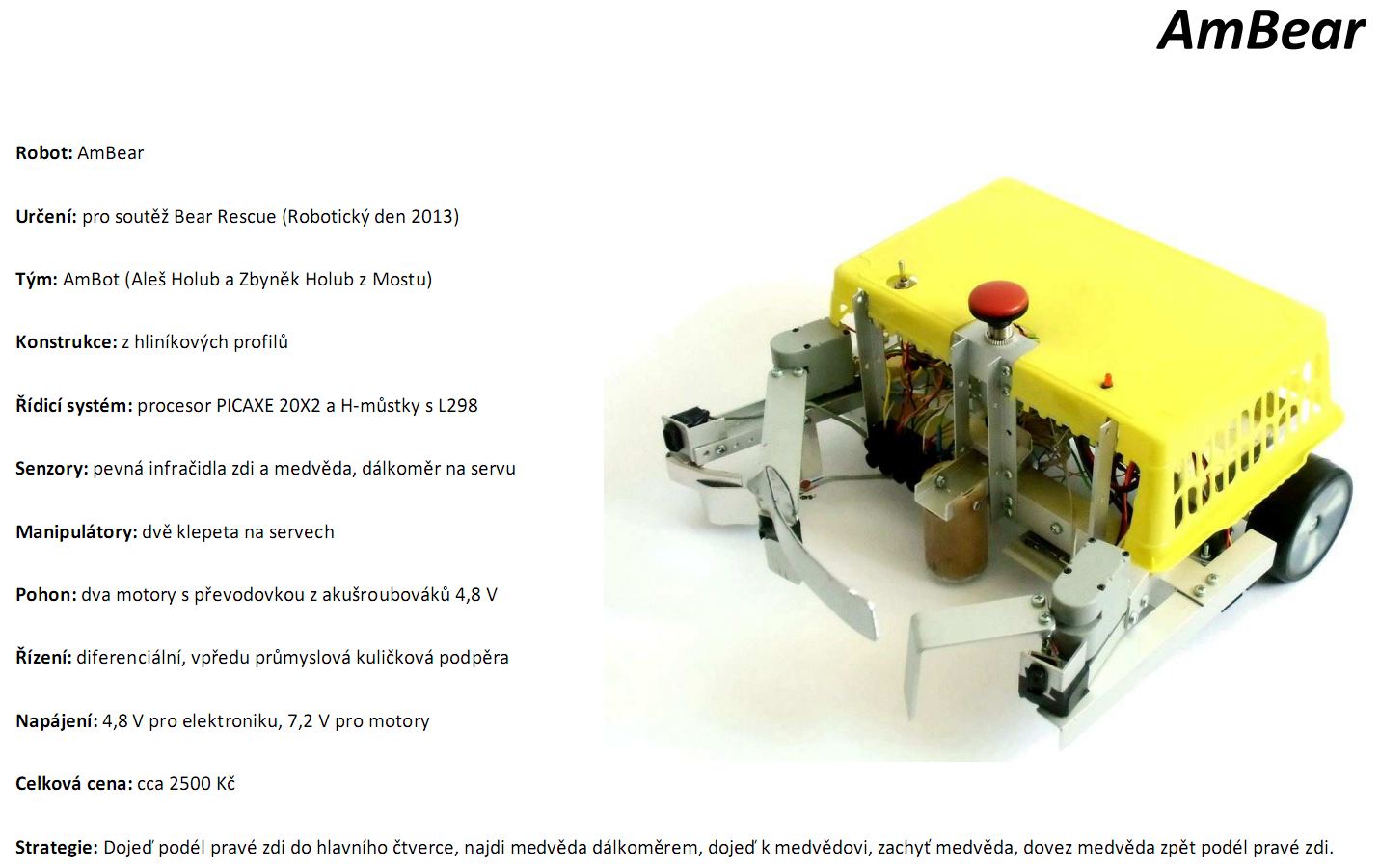
¨Na Robotickém dni 2013 bylo v kategorii RoboCarts málo soutěžících a hlavním soupeřem byl robot Nite 3 slovenského týmu RGT. Tento robot byl po vyladění o něco rychlejší než AmCar, ale protože v poslední jízdě Nite 3 nedojel (ztratil z dohledu levou zeď podle které se orientoval), tak v součtu pěti soutěžních jízd nakonec AmCar na body těsně vyhrál. Bylo to příjemné vítězství po loňském neúspěchu. V dalším vývoji AmCaru chci měnit rychlosti jízdy podle odhadované pozice (v zatáčce u startovních boxů zpomalit), pokusit se využít boční IR čidla k jízdě podél zdi na rovinkách a případně i zpřesnit zatáčení pomocí odometrie. Jde o to vyhýbat se soupeřům a přitom jet co nejrychleji. AmBear Konstrukce robota AmBear také vycházela z verze pro rok 2012, ale navíc přibylo jedno IR čislo vlevo vpředu (pro lepší detekci zdi nebo medvěda). Řídicí systém s PICAXE 20X2 zůstal v principu stejný, ale přestavěl jsem ho z nepájivého pole na desku s univerzálním plošným spojem (pro lepší vzhled a vyšší spolehlivost). Důležitou novinkou byl také "drápek" na pravém klepetu, který zasahoval až nad postranní zeď hřiště, takže umožňoval snazší "vyškábnutí" medvěda od zdi, nebo z rohu. Algoritmus z roku 2012 byl jen trochu upraven pro opatrnější (pomalejší) dojezd k medvědovi a pár timeoutů při různých detekovaných potížích během odvozu medvěda. Konkurence na Robotickém dni 2013 v kategorii Bear Rescue Advanced byla značná (přes 10 soutěžících robotů). AmBear byl rychlý a velmi spolehlivě nacházel a uchopoval medvěda (cca v 90% případů). Problémy měl ale s odvozem medvěda zpět ke startu. Algoritmus odvozu byl zřejmě překombinovaný, takže AmBear se s medvědem často zasekl u zdi a nebyl už schopen se z této situace dostat. Přesto se nám během kvalifikace podařilo dvakrát dostat medvěda až do cíle (jedno dojetí rozhodčí o pár centimetrů neuznal) a to ve druhém nejrychlejším čase ze všech ostatních robotů. Ve vyřazovacích jízdách nejprve AmBear jednou úspěšně dostal medvěda do cíle (čímž postoupil) a v semifinále se štěstím postoupil dál proto, že v kvalifikaci měl lepší čas než soupeř (GymŠpit). Ve finále už se AmBearu nedařilo a na robota Koulíčka nestačil, ale druhé místo považuji také za velký úspěch. Do dalšího ročníku uvažuji o doplnění IMU nebo kompasu do robota (pro přesnější navigaci), o možnosti couvání s medvědem zpět do cíle a především se pokusím vylepšit algoritmus odvozu medvěda tak, aby si lépe poradil s nestandardními situacemi. Spolehlivost odvozu medvěda k cíli je to hlavní, co AmBearu v roce 2013 chybělo. AmStore Tohoto robota jsem postavil až na jaře 2013 pro soutěž Ketchup Store na Robotickém dni v Praze. Chtěl jsem vyzkoušet, jak bude fungovat princip dopravy kečupů tlačením v zásobníku uprostřed robota. Tento princip vyžadoval netradiční způsob sledování čáry tak, aby čidla nepřekážela při nabírání plechovek s kečupem. Nakonec jsem použil dvě infračevená čidla, sledující čáru vpředu z výšky cca 8 cm, takže kečupy mohly projít pod těmito čidly. Vyladění sledování čáry z této poměrně velké dálky bylo obtížné, ale nakonec bylo poměrně spolehlivé a navíc stejná čidla umožňovala detekovat nabírané plechovky. Řídicí systém jsem postavil na PICAXE 20M2 ve spojení s dvojitým H-můstkem SN754410. Mechanická konstrukce je vidět na obrázku níže. Algoritmus spočíval v jízdě po čarách, v detekci křižovatek a podle toho v jízdě po několika předdefinovaných trasách, na níchž bylo možno očekávat výskyt plechovek s kečupem. Na Robotickém dni 2013 fungoval náš robot i algoritmus docela dobře, ale vždy jen do okamžiku, kdy se střetl se soupeřem, který našeho robota obvykle trochu postrčil, takže AmStore pak ztratil orientaci a vozil kečupy mimo domovskou čáru, často i k soupeři. Pár bodů jsme vždy získali, ale prohrávali jsme jeden zápas za druhým (soupeři mívali ještě víc bodů). Počet bodů ale nakonec stačil na postup do vyřazovacích kol a tam jsme se se štěstím probojovali až do finále. Ani ve finále si AmStore nevedl špatně a prohrál čestně o jedinou plechovku. Druhé místo v soutěži bylo velmi pěkné a jsem za něj velmi rád. Jednoznačným doporučením pro příští rok je instalace magnetometru (kompasu) do robota tak, aby mohl AmStore s jistotou obnovit svou pozici i po ztrátě orientace (např. po střetu se soupeřem). AmLine V roce 2013 jsem se rozhodl zkusit si i kategorii Line Follower. Postavil jsem rychlého robota ze dvou starých autodráhových autíček, s trojčidlovým sledováním čáry a s hrubou odometrií na jednom hnaném kole. Řídicím systémem byl opět PICAXE 20M2 ve spojení s dvojitým H-můstkem SN754410 (všechny čtyři naše roboty na Robotickém dni 2013 byly řízeny pomocí PICAXE). Nebyl problém dosáhnout na rovině rychlost přes 2 m/s, ale do zataček AmLine dost klouzal, takže programově jsem musel rychlost jízdy velmi snížit. Na Robotickém dni 2013 soutěžilo v kategorii Line Follower přes 30 robotů. AmLine skončil v kvalifikaci na 11. místě. Nebyl to špatný výsledek ale AmLine svou konstrukcí principiálně na nejlepší nestačil. V dalších letech už se zřejmě této kategorii nebudu věnovat.